Development of orchards forms
Deciduous fruit trees lead in orchard forms in modern orchards
Amnon Erez, Emeritus The Volcani Center, erezamn@gmail.com
Deciduous fruit trees lead in orchard forms in modern orchards.The aim of tree form is to adapt the development and growth of the orchard to grower’s convenience and to make fruit production more economical.Many of the natural tree forms produce too large and too tall a tree, making the treatment of the orchard, especially fruit picking, difficult.
For a long time, the main effort was to get a smaller tree. This was achieved by selecting low vigor cultivars but mostly dwarfing rootstocks that control the vigor of the cultivar grafted on them (3,13). Apple was the main species where these developments took place. A variety of level of growth control was obtained in apple rootstocks first in East Malling Research Station in England and later in many other countries (13). Especially successful was the work done in recent years in Geneva, NY, USA, leading to new series of tree vigor for apples (3). On the basis of this development, a variety of different vigor rootstocks was produced, adapted to different climates and soils. Especially successful were low vigor trees dwarfing root stocks that produced easy to manage orchards that could be treated from soil level without the need of ladders. The system was organized as a dense planting along the rows while leaving a wide space between the rows for machinery to pass.
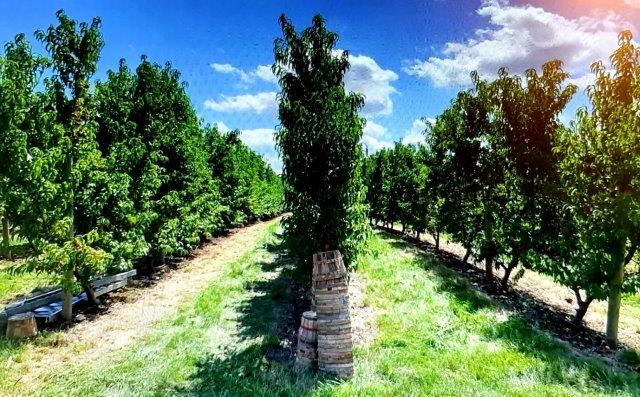
Picture 1: UFO two dimentionl peach orchard
The distances in the row were such that the canopy of the trees produced a closed wall of foliage and fruits (9). A typical distance was about 1*4 m. and tree height, depending on the rootstock, from 1.5 m to 4 m. Planting orientation was generally north to south exposing the rows to sunlight in the morning from the east and in the afternoon from the west. The leading rootstock used was the dwarfing East Malling 9 (13). This pattern fits also the drip irrigation system as the lines run along the closed row. This system of closed rows – a fruiting wall, was adopted in orchards of all species mostly without having dwarfing rootstocks.
Every growing system has to verify that the trees will intercept a high percentage of sunlight without compromising on uniform light distribution (4). The level of light interception is expressed as the percent light intercepted by the trees canopy divided by the light falling on the area. It can be expressed also by the Leaf Area Index (LAI) which indicates the total leaf area (one side) divided by the area the tree occupies. No part of the tree should get less than 30% of the sun irradiation that falls on the area (8). This is controlled by the ratio of the tree height to the free alley way between rows. A 1:1 ratio was found to verify a good sunlight exposure to the whole tree. Clearly, a narrower canopy allows for denser between row planting.Thus, a 2 m tree height with 4 m between row distance, convenient for tree handling from the ground, compromised on light interception which will result in less than maximal yield possible. All the different tree forms suggested for the last 50 years in apple used this pattern changing only the tree form in the row while keeping the close spacings in the row to produce a fruit producing closed wall.
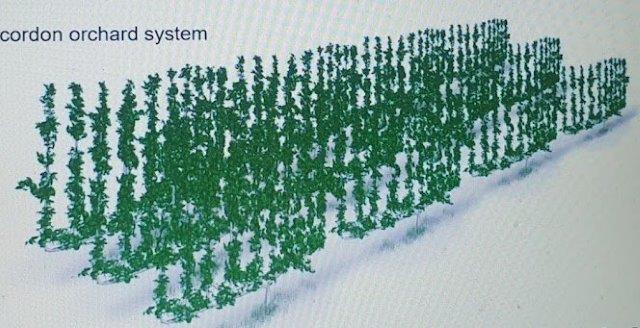
Picture 2:Planar cordon two-dimensional apple orchard
Two recent developments led to a major change in tree form. The first one aimed at maximizing production and the second adapting the tree to mechanical and especially to robotic fruit harvesting. It is interesting that for both developments, the same concept seems to work.
The new concept of tree training was to develop a two-dimensional fruit tree. The idea was to avoid the complex natural three-dimensional tree and train the tree to a very narrow form along the row axis. The width of the tree was not larger than 50 cm. This idea developed in various places with leading research work done by Dorigoni in Italy (1,2) Tustin in New Zealand (11,12) and Lang in the USA(5,6) (Pictures 1-4). It probably started with the suggestion of replacing the single axis of the popular spindle form in apples and pears to a two-axes tree (7). The 2 axes were found better than a single axe leading to examining distribution of the tree vigor to more axes. One approach was to establish a tree with a single bent trunk to the horizontal position at 50 cm above ground, and developing many upright shoots that will constitute the main tree skeleton.This was the concept of the Guyot system of Dorigoni (1,2) and the UFO system of Lang (5,6). Another similar system but based on the bi axis was the planar 2 arm system of Tustin in
New Zealand trained to a cordon in opposite directions along the row that were positioned close to horizontal, from which 10 axes per tree developed, 5 on each arm (11,12). All these systems were built on the two-dimensional tree concept.the basic production unit became the axe and the fruits were produced from spurs on the axe itself. All side branches were pruned.

Picture 3: Guyot two-dimensional apple orchard
Tustin went further to examine the maximal commercial yields possible and reduced considerably the between row spacing, taking advantage of the relatively large free alley way as the tree canopy was so narrow. He experimented with 2m and 1.5m between row spacings and kept the inrow spacing to 3 m between trees leaving a space of 0.3 m between the axes while aiming at getting a 3 m tree height. In his publication with the planar system (12), he predicts, based on his present experience, maximal potential yield of 250 to 315 t/ha depending on cultivar. Never before such a yield of a high-quality fruit was ever mentioned for any fruit crop. This achievement stems from an orchard planting system that could intercept about 90% of the light falling on the area with a LAI of 3-5, while preventing excessive shade.
This narrow between the rows spacings call for a novel machinery that could be adapted to it. With a 2 m spacings and 1.5 m free alley way, narrow machines could be adapted to.The question is if these systems could be adopted commercially or that compromises will have to take place.
One option is to turn this orchard system into a pedestrian orchard where all activity is carried out from the ground. This will dictate reducing tree height to about 2.2 m.
Another option is to adapt the system to mechanical- robotic fruit picking. In this option tree height could be fixed to 3.5-4 m but also between row spacings should be increased to 3.5 m.
The search for machines that can pick fruit mechanically by robotic arms was driven by the fact that fruit harvesting is an activity that requires having many pickers in a short period of time. The diminishing availability of manual power for picking fruits urged growers to look for mechanical harvesting. Recently, a rapid development of fruit picking machines based on robotic “arms” having a camera and a system for delicate fruit picking is taking place. The camera could be programmed to pick the right color and fruit size. This led growers to adapt the orchards to robotic fruit harvesting. The major demand was to have all the fruits exposed so that the robotic “eye” will be able to “see“ the fruits from two sides of the row. This meant no obstruction of leaves and branches. The outcome was a very narrow width of the row around 50 cm, the same two-dimensional orchard system. This narrow rows still had to be separated by a relatively wide between-row spacing to accommodate for the robotic machines.
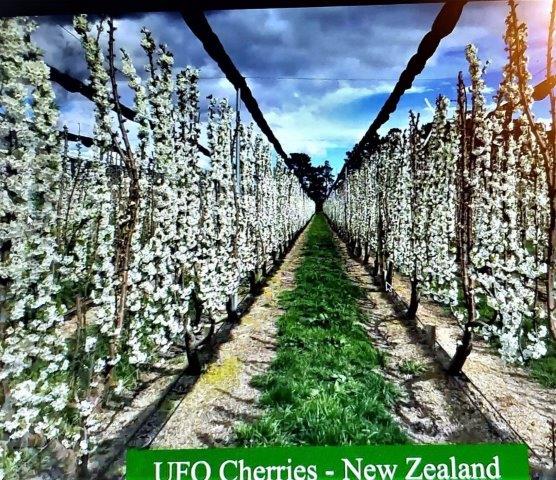
Picture 4: UFO two-dimensional cherry orchard
Efforts are made to adapt this planting system to other species. Pears, cherries apricots and plums are good candidates as they have relatively strong upright growth and they carry fruits on spurs that could be produced on the upright axes or close by. Trials with apricots and cherries are in progress (10). With species that produce fruit on annually grown branches especially when the fruit is borne on the terminals it will be more difficult to adapt to this system.
A new option as to the tree vigor appeared: the more vigorous the tree, the more axes have to be left on the tree and in row spacings have to be increased. Vigor can be controlled by increasing the number of axes per tree. Firstly, a new option to control excessive vigor without using size-controlling rootstocks appeared. This new option is especially important in all species lacking size controlling rootstocks.
Recently, a growing awareness is developing as to the risk of sun burn in fruits with the global warming and expected increase in heat waves. It was shown that partial shading of the fruit by leaves may have beneficial protecting effects but this interferes with robotic fruit picking. An over the orchard nets seems the best solution for this conflict especially in subtropical hot climate. Nevertheless, a relatively vigorous tree is still needed to allow for good water transport to the canopy in time of excessive water need in a heat wave event. This gives another advantage to the multi leader tree grafted on medium vigor rootstocks like MM106 over the dwarfing rootstocks in controlling excessive tree vigor.
The recent awareness to the human responsibility for producing greenhouse gases that are responsible for the global warming led to a move away from use of fossil fuel to renewal green energy especially to solar panels. The shortage of available free land for establishing solar panel fields in Israel led to an investigation of the potential of erecting such panels above existing orchards. The two-dimensional multileader system seems especially suited to such a combination as it is less sensitive to the planting orientation and it can be planted in an east to west orientation without compromising the yield. This stems from the narrow row width that allows light penetration through the canopy. Thus, with east to west orientation, panels on top of the row facing south can allow this double soil use for orchards and energy production. Calculations show that no heavy shade will fall over the trees that will get most of the light from the south (Erez unpublished data).
It was shown that by changing the tree form it is possible to adapt the tree and the orchard to the grower’s needs without compromising on yield and fruit quality. Deciduous fruit trees are leading this approach that may benefit also evergreen orchards



